

FHA-C H Rotary Actuator
FHA-C Series servo actuators are now available with IP65 protection. Four sizes are available: 17, 25, 32 and 40. The IP65 rated FHA-C actuator is ideal for harsh environments. With IP65 and 480V, the FHA actuator is well suited for machine tool, packaging, and wash-down applications.
These rotary servo actuators utilize Harmonic Drive® precision strain wave gears combined with a performance matched brushless servo motor. Encoder options now include EnDat® & HIPERFACE®. The FHA has a low-profile form factor and features a hollow-output shaft. This hollow shaft feature may be used to pass cables, tubing or lasers through the axis of rotation.
The FHA series is designed to operate with a wide range of third-party servo drives including Bosch, Mitsubishi, Siemens, and Kollmorgen. REL Drive also compatible at approximately half speed.
- Zero Backlash
- Reduction Ratio 50:1, 100:1, 160:1
- IP65 Rating
- 480VAC
- EnDat® & HIPERFACE® Encoder Protocols
- DESINA style flex rated cables
Safety Standard: EN60034-1:2010, EN60034-5 
Ordering Code
| FHA | - | 17 | C | - | 50 | - | H | - | B | - | SE032SC | - | KP | - | SP |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 1. | Model |
FHA-C Series
|
| 2. | Size |
17, 25, 32, 40
|
| 3. | Design Version |
C
|
| 4. | Gear Ratio |
50, 100, 160
|
| 5. | Winding Voltage |
H - 680VDC
|
| 6. | Brake |
Blank - without brake |
| 7. | Motor Feedback |
SE032SC - EnDat2.1 with Sin-Cos; Single turn absolute SE19b22 - EnDat2.2 (Full digital); Single turn absolute ME19b22 - EnDat2.2 (Full digital); Battery buffered multi turn absolute SH064SC - HIPERFACE; Single turn absolute MH064SC - HIPERFACE; Multi turn absolute
|
| 8. | Options |
K - Rear exiting cable (Standard: Side Exit)
|
| 9. | Special specification |
Blank - Standard product
|
Specifications
| Item / Model | FHA-17C-H | FHA-25C-H | FHA-32C-H | FHA-40C-H | |||||||||
| Gear Ratio | 50 | 100 | 160 | 50 | 100 | 160 | 50 | 100 | 160 | 50 | 100 | 160 | |
| Max torque | Nm | 39 | 57 | 64 | 151 | 233 | 261 | 281 | 398 | 453 | 500 | 686 | 823 |
| Max Current | Arms | 1.4 | 1.1 | .8 | 3.9 | 3 | 2.2 | 6.5 | 4.7 | 3.5 | 9.3 | 6.4 | 5 |
| Continuous Torque | Nm | 15 | 23 | 23.2 | 40 | 72 | 90 | 60 | 153.5 | 240 | 90 | 234 | 400 |
| Continuous Current | Arms | .65 | .55 | .45 | 1.3 | 1.3 | 1.25 | 2 | 2 | 1.9 | 2.4 | 2.4 | 2.4 |
| Max Speed of Rotation | rpm | 96 | 48 | 30 | 90 | 45 | 28 | 80 | 40 | 25 | 70 | 35 | 22 |
| Motor EMF Constant (Line-Line) |
Vrms/(krpm) | 50 | 57 | 67 | 80 | ||||||||
| Vrms/(rad/s) | 0.48 | .55 | .64 | 0.77 | |||||||||
| Phase Resistance (20°C, Line-Line) |
Ω | 64 | 22.4 | 7.8 | 5.6 | ||||||||
| Phase Inductance (Line-Line) |
mH | 42 | 20 | 9.8 | 11.2 | ||||||||
| Torque Constant 680VDC | Nm/Arms | 37 | 75 | 120 | 42 | 86 | 138 | 49 | 100 | 160 | 59 | 120 | 193 |
| Moment of Inertia(GD2/4) | kg.m2 | .21 | 0.83 | 2.1 | .90 | 3.5 | 9.2 | 2.1 | 8.2 | 21 | 5.5 | 22 | 56 |
| Allowable radial load | kN | 2.9 | 4.9 | 9.5 | 14.7 | ||||||||
| Allowable axial load | kN | 9.8 | 14.7 | 24.5 | 39.2 | ||||||||
| Allowable moment load | Nm | 188 | 370 | 530 | 690 | ||||||||
| Moment stiffness | Nm/rad | 220 x 103 | 490 x 103 | 790 x 103 | 1,400 x 103 | ||||||||
| One-way positioning accuracy | arc/sec | 60 | 40 | 40 | 40 | 30 | 30 | 40 | 30 | 30 | 40 | 30 | 30 |
| Feedback Type | Single-turn absolute (EnDat and HIPERFACE) Multi-turn absolute (EnDat) |
Single-turn absolute (EnDat and HIPERFACE) Multi-turn absolute (EnDat) |
Single-turn absolute (EnDat and HIPERFACE) Multi-turn absolute (EnDat) |
Single-turn absolute (EnDat and HIPERFACE) Multi-turn absolute (EnDat) |
|||||||||
| Quad Encoder resolution * 1 | p/rev | 500.000 | 1.000.000 | 1.600.000 | 500.000 | 1.000.000 | 1.600.000 | 500.000 | 1.000.000 | 1.600.000 | 500.000 | 1.000.000 | 1.600.000 |
| No. of Pole Pairs | 6 | 6 | 6 | 6 | |||||||||
| Motor Inertia (without brake)*2 |
EnDat | 1.37 | 3.95 | 7.63 | 19.3 | ||||||||
| HIPERFACE | 1.44 | 3.65 | 7.33 | 19.3 | |||||||||
| Motor Inertia (with brake)*2 |
EnDat | 1.66 | 4.84 | 9.00 | 21.9 | ||||||||
| HIPERFACE | 1.73 | 4.54 | 8.69 | 21.9 | |||||||||
| Mass | kg |
3.3 | 4.6 | 6.8 | 10.8 | ||||||||
| Mass w/brake | 3.7 | 5.4 | 7.7 | 12.8 | |||||||||
| Optional Mating Cable | M17 |
Motor Cable Part Number: 1590657-02/05/10 Feedback Cable Part Number: 1590658-02/05/10 (02=2m, 05=5m, 10=10m) |
|||||||||||
*1:Quad Encoder resolution is calculated by (Motor shaft resolution) x4x (Reduction ratio)
*2 Inertia shown in this table is at input side. To convert to output side, multiply the inertia by (ratio)2
Dimensions
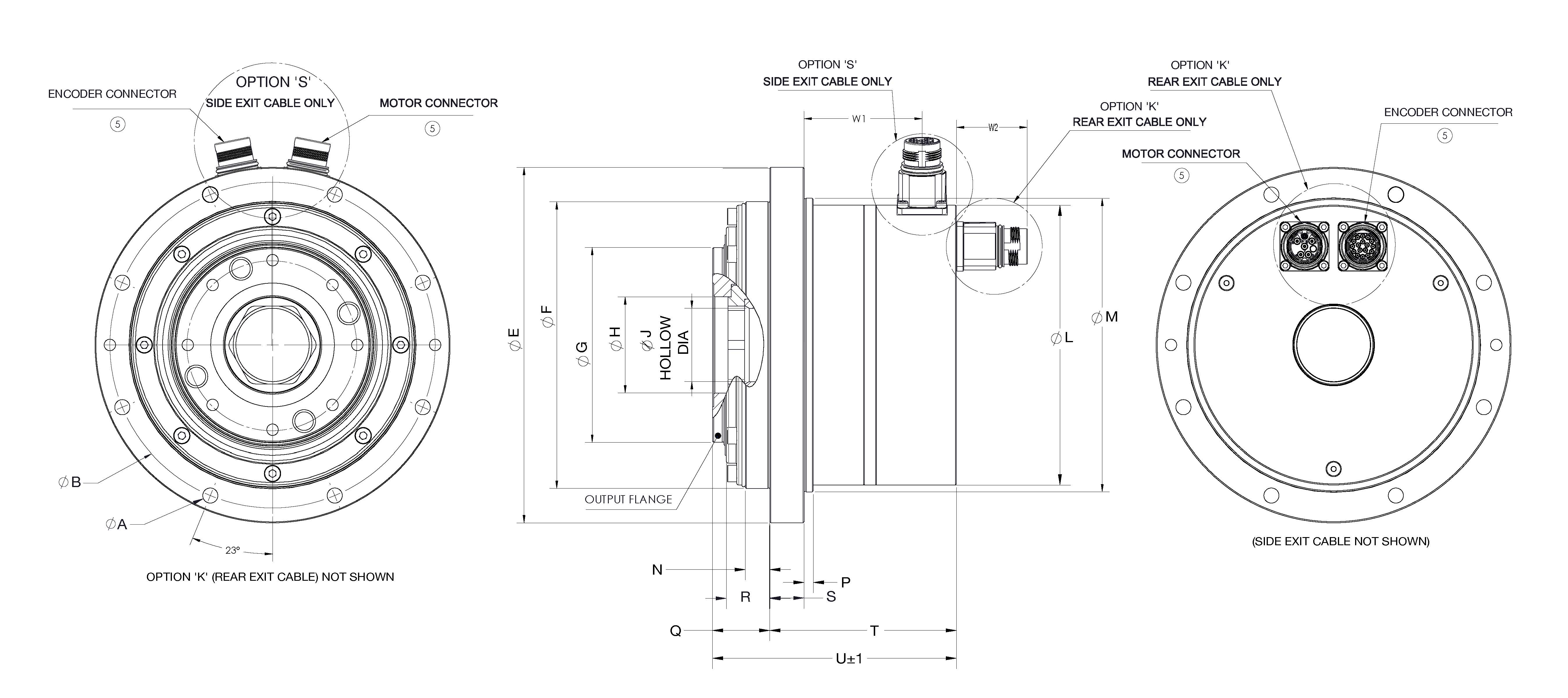
| ITEM / MODEL | FHA-17C-H | FHA-25C-H | FHA-32C-H | FHA-40C-H |
| A | 6-ø5.5-5.7 | 8-ø6.6-7.0 | 12-ø6.6-7.0 | 8-ø11-11.4 |
| ØB | 118 | 142 | 162 | 208 |
| ØC | 60 | 74 | 95 | 112 |
| D |
6-M5 |
8-M6 Depth 10 |
16-M6 Depth 12 |
8-M10 Depth 15 |
| ØE | 128 | 155 | 175 | 230 |
|
ØF h7 (standard) ØF +0.5/- 0 (R option) |
105 | 125 | 140 | 185 |
| ØG h7 | 70 | 85 | 105 | 130 |
| ØH H7 | 25 | 42 | 60 | 60 |
| ØJ +/-1 | 18 | 32 | 35 | 43 |
| ØL | 106 (108*6 ) | 123 | 140 | 163 |
|
ØM + 0.5/- 0 (standard) ØM h7 (R option) |
108 | 128 | 148 | 185 |
| N | 6.6 | 10.7 | 7.7 | 11.1 |
| P | 4 | 4 | 4 | 8 |
| Q | 21 | 25 | 22 | 30 |
| R | 15.5 16.7*1 |
20 20.5*1 |
17 17.6*1 |
23 21.1*1 |
| S | 12 | 15 | 18 | 22 |
| T | 84.5 100*2 |
81.5 107.5*2 |
107 133*2 |
113.8 134.8*2 |
| U | 105.5 121*2 |
106.5 132.5*2 |
129 155*2 |
143.8 164.8*2 |
| W1*3 | 49 64*2 |
52 77*2 |
71 97*2 |
71.7 92.7*2 |
| W2*4 | 31 | 31 | 31 | 31 |
*1) With option “P” IP65 output seal
*2) With brake
*3) Side connectors
*4) Option “K” rear connectors
*5) Connector positions are swapped for SH064SC encoder option
*6) Dimension for SH064SC option only