FLA Rotary Actuator
The new ultra-flat, ultra-light brushless actuators combine our high-precision/high-performance reducers with a compact, high-output brushless DC motor. FLA actuators are available with our high-speed, high-efficiency Harmonic Planetary® gearhead or with our high-precision, high-torque Harmonic Drive® reducer. This new series is ideal for wide range of applications such as AGV wheel drives and powered exoskeletons. We offer both 24VDC and 48VDC versions to work with battery-powered applications.
Key Features:
- Ultra-Flat Shape
- Multiple Options Available: Four sizes, multiple ratios, and two voltages
- Lightweight
- Designed to operate with a wide range of third-party servo drives
Ordering Code
| FLA | - | 11 | A | - | 09 | - | HP | - | H | - | 24 | - | SP |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 1. | Model |
: Brushless DC Actuator FLA Series
|
| 2. | Size |
: 11, 14, 17, 20
|
| 3. | Design Version |
: A
|
| 4. | Gear Ratio |
: Harmonic Planetary® Gear - 08 (Size 11 & 14), 09 (Size 17) : Harmonic Drive® Gear - 50, 100 |
| 5. | Gear Type |
: FB - Harmonic Drive® Gear : HP - Harmonic Planetary® Gear |
| 6. | Sensor |
: H - Hall sensor |
| 7. | Winding Voltage |
: 24 - 24VDC : 48 - 48VDC |
| 8. | Special specification |
: Blank - Standard product
|
Specifications
FLA-HP
| Item / Model of actuator | FLA-11A-08-HP | FLA-14A-08-HP | FLA-17A-09HP | FLA-20A-09HP | |
| Gear Ratio | 8 | 8 | 9 |
9 | |
| Maximum Torque | Nm | 1.8 | 3.7 | 7.3 | 12.1 |
| Allowable Continuous Torque | Nm | 0.6 | 1.2 | 3 | 4.1 |
| Maximum Speed | rpm | 500 | 500 | 500 | 400 |
| Allowable Continuous Speed | rpm | 100 | 100 | 100 | 100 |
| Maximum Current (24VDC) | Arms | 8.7 | 18.0 | 26.2 | 31.4 |
| Maximum Current (48VDC) | Arms | 4.5 | 9.6 | 13.6 | 17.8 |
| Allowable Continuous Current (24VDC) | Arms | 3.0 | 6.0 | 10.4 | 10.7 |
| Allowable Continuous Current (48VDC) | Arms | 1.6 | 3.0 | 5.3 | 6.0 |
| Moment of Inertia(GD2/4) | kg.m2 | 0.00013 | 0.00039 | 0.001 | 0.0026 |
| Allowable Moment Load | Nm | 1.2 | 1.6 | 2.0 | 2.4 |
| Moment Stiffness | Nm/rad | 2.0 x 103 | 3.3 x 103 | 4.4 x 103 | 5.1 x 103 |
| Motor Position Sensor | Hall sensor | ||||
| Positioning Resolution per Motor Rotation | counts/rev | 30 | 30 | 30 | 48 |
| Output Shaft Resolution | counts/rev | 240 | 240 | 270 | 432 |
| Weight | g | 390 | 620 | 870 | 1,060 |
| Installation Direction | Can be installed in any direction | ||||
| Enclosure | Fully enclosed self-cooling (IP40) | ||||
FLA-FB
| Item / Model of actuator | FLA-11A-XXFB | FLA-14A-XXFB | FLA-17A-XXFB | FLA-20A-XXFB | ||||
| Gear Ratio | 50 | 100 |
50 |
100 | 50 | 100 | 50 | |
| Maximum Torque | Nm | 6.7 | 11 | 11.2 | 18.2 | 23 | 34 | 33 |
| Allowable Continuous Torque | Nm | 1.7 | 2.4 | 2.6 | 3.8 | 7.9 | 11.4 | 13 |
| Maximum Speed | rpm | 100 | 50 | 100 | 50 | 100 | 50 | 80 |
| Allowable Continuous Speed | rpm | 60 | 30 | 60 | 30 | 60 | 30 | 50 |
| Maximum Current (24VDC) | Arms | 6.0 | 5.0 | 9.7 | 8.7 | 18.4 | 14.3 | 19.2 |
| Maximum Current (48VDC) | Arms | 3.1 | 2.6 | 4.8 | 4.2 | 9.4 | 7.2 | 10.7 |
| Allowable Continuous Current (24VDC) | Arms | 1.9 | 1.7 | 3.0 | 2.5 | 6.8 | 5.3 | 8.7 |
| Allowable Continuous Current (48VDC) | Arms | 1.0 | 0.8 | 1.5 | 1.2 | 3.4 | 2.9 | 5.1 |
| Moment of Inertia(GD2/4) | kg.m2 | 0.0073 | 0.029 | 0.019 | 0.077 | 0.048 | 0.19 | 0.12 |
| Allowable Moment Load | Nm | 1.2 | 1.6 | 2.0 | 2.4 | |||
| Moment Stiffness | Nm/rad | 2.0 x 103 | 3.3 x 103 | 4.4 x 103 | 5.1 x 103 | |||
| Motor Position Sensor | Hall sensor | |||||||
| Positioning Resolution per Motor Rotation | pls/rev | 30 | 30 | 30 | 48 | |||
| Output Shaft Resolution | pls/rev | 1500 | 3000 | 1500 | 3000 | 1500 | 3000 | 2,400 |
| Weight | g | 420 | 720 | 940 | 1,170 | |||
| Installation Direction | Can be installed in any direction | |||||||
| Enclosure | Fully enclosed self-cooling (IP40) | |||||||
Refer to the FLA User Manual for more details
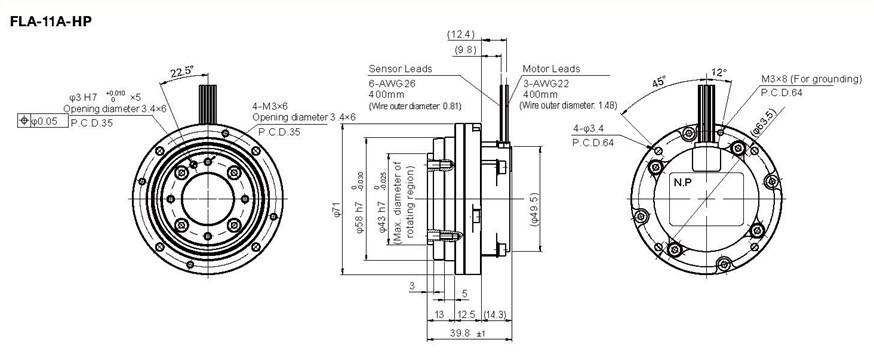
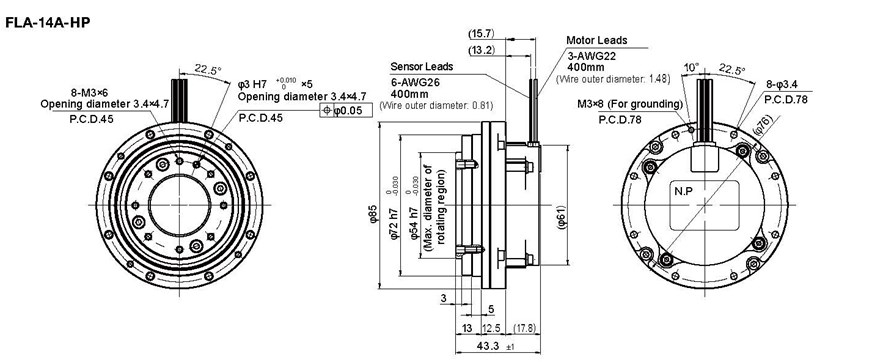
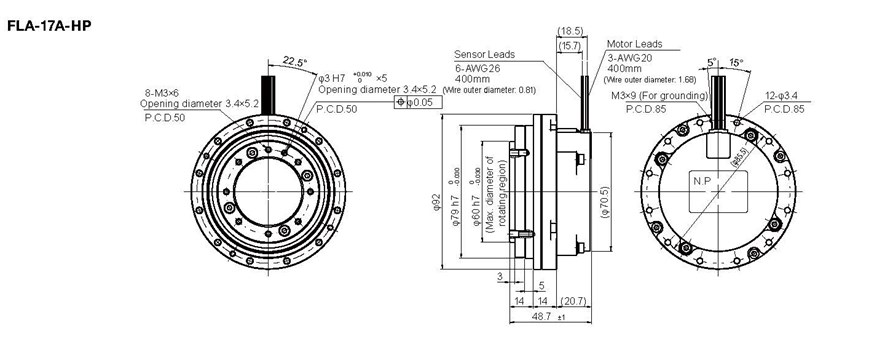
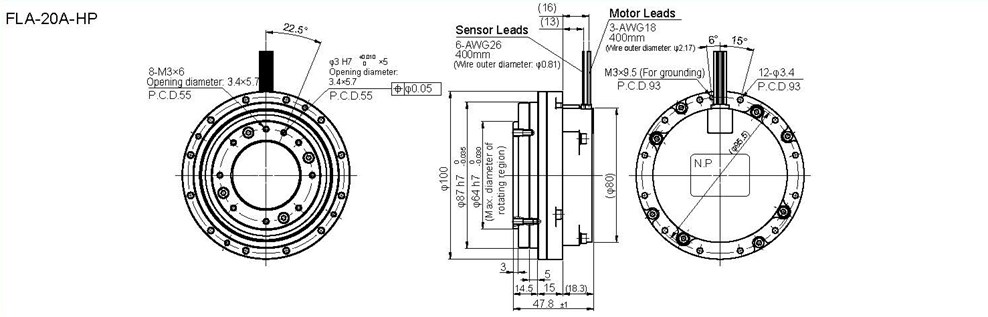
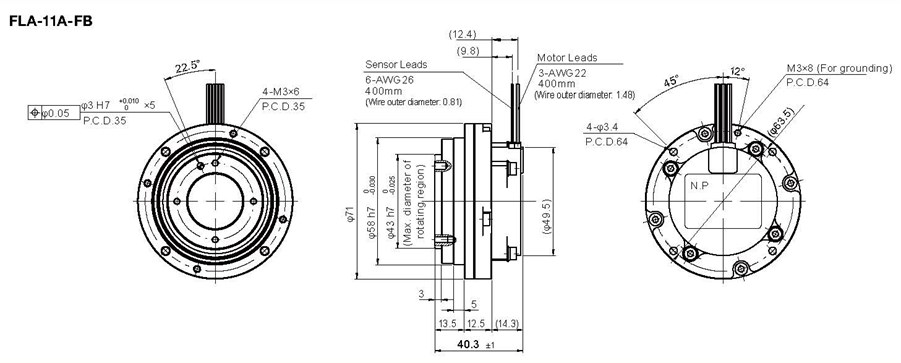
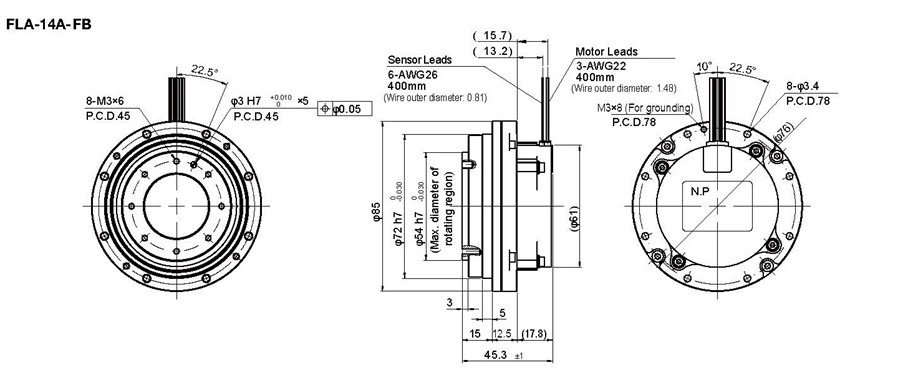
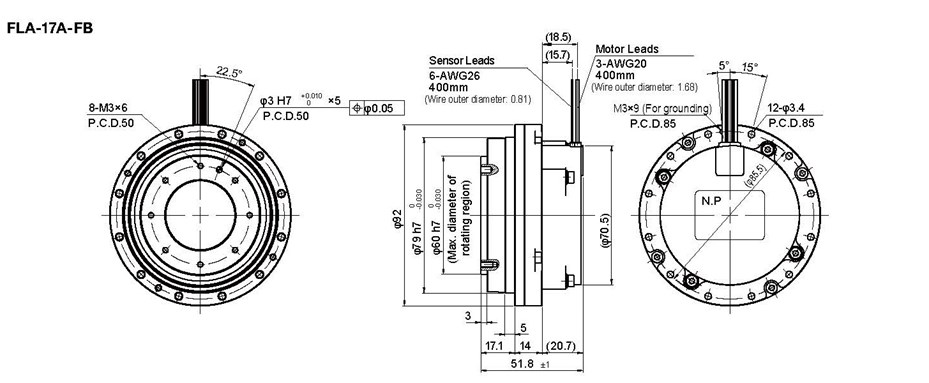
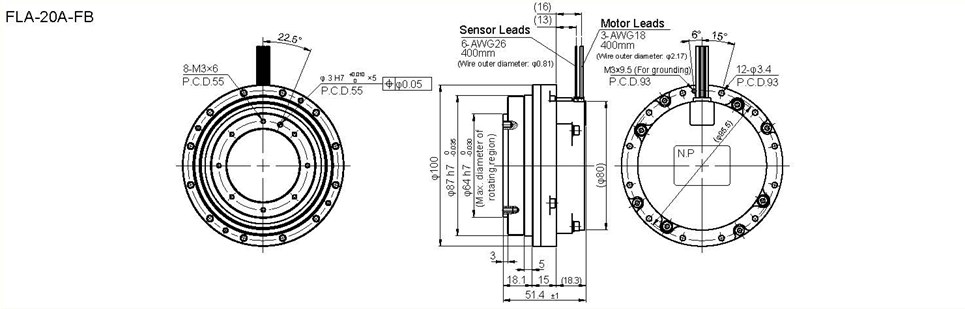
Outline Drawings (Unit: mm)